Armonía entre mente y máquina
Investigadores de la UMH colaboran en un proyecto europeo para el desarrollo de exoesqueletos robóticos
Como apuntaba el Premio Nobel en Medicina Eric Kandel, el cerebro continúa siendo uno de los secretos mejor guardados de la naturaleza. Quizá por ello, algunos de los centros de investigación más importantes a nivel mundial, como es el caso de la Agencia DARPA o el National Institute of Health, concentran en la actualidad buena parte de sus recursos en el estudio del cerebro. Por ejemplo, en la aplicación de herramientas de ingeniería para analizar los mecanismos y procesos que tienen lugar en la mente humana.
El trabajo que lleva a cabo el grupo del Departamento de Ingeniería de Sistemas y Automática de la Universidad Miguel Hernández de Elche UMH dentro del proyecto europeo BioMot, bajo la dirección del profesor José María Azorín, se enmarca también en la investigaciónde los procesos cerebrales. En concreto, registran y clasifican las señales encefalográficas para determinar y estudiar cuáles son aquellas que tienen que ver con el proceso de desplazamiento o marcha. El objetivo es construir estructuras robóticas capaces de acoplarse a las personas que padecen movilidad reducida. Exoesqueletos que les permitan caminar, a través de una relación interfaz-robot transparente y simbiótica. “El reto está en conseguir, por una parte, que los exoesqueletos alcancen una movilidad más parecida a la marcha humana y que sean capaces de adaptarse al entorno y, por otra, en mejorar la interfaz y su capacidad de relacionarse con la mente”, explica Azorín.
BioMot: Robots vestibles inteligentes con habilidades motoras y sensoriales bioinspiradas, tendrá una duración de 3 años y ha sido financiado con más de 2 millones y medio de euros de euros por el 7º programa marco de la Comisión Europea. En la investigación, también colaboran las universidades europeas Libre de Bruselas (Bélgica) y la de Padova (Italia); el centro de investigación japonés RIKEN; el Hospital Nacional de Parapléjicos de Toledo y las empresas Technaid S.L (España) y Össurhf (Islandia). La coordinación corre a cargo del Grupo de Bioingeniería del Consejo Superior de Investigaciones Científicas (CSIC).
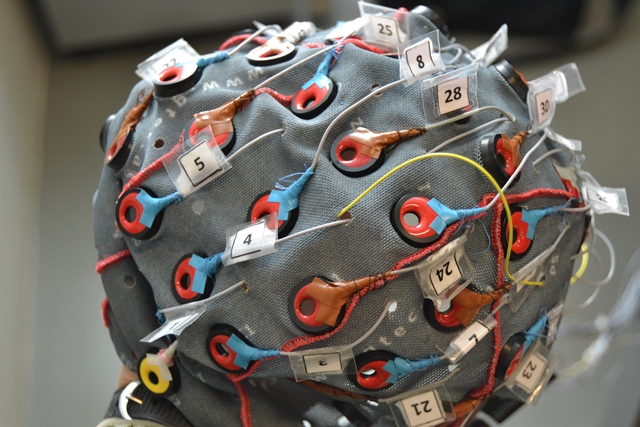
Según explica el profesor Azorín, para interaccionar con el exoesqueleto, las señales encefalográficas son procesadas mediante cálculos matemáticos y clasificadores: “Un algoritmo extrae las principales características de la señal y el clasificador determina si corresponden o no la intención de iniciar o parar la marcha. Lo que se consigue con un entrenamiento previo del clasificador”. Se trata de una línea de trabajo que ya se encuentra muy avanzada porque se relaciona con otros proyectos también desarrollados por el Departamento, como por ejemplo el del robot bimanual que se presentó el pasado mes de septiembre, capaz de interpretar y ejecutar las órdenes gracias a un dispositivo de electrodos.
Según el profesor, en el diseño de la interfaz para BioMot se diferencian cuatro líneas de trabajo:
La primera se centra en conseguir un control cognitivo del robot, es decir, que sea capaz de detectar cuándo la persona quiere empezar a caminar, cambiar de dirección o de velocidad y que esto se produzca sin la necesidad de pulsar un determinado botón. “En los exoesqueletos que se comercializan hoy en día, el control no se hace de forma transparente, sino a través de botones, que son los que llevan a que el robot se inicie o se detenga”, puntualiza el profesor.
La segunda línea de investigación se centra en mejorar la decodificación de las señales electroencefalográficas relacionadas con la marcha para conocer los mecanismos que están ocurriendo a nivel cortical. Por un lado, se registran y miden las señales cerebrales de la persona y, por otra parte, se tienen en cuenta los parámetros relacionados con el paseo, para determinar la relación existente entre ambos. “Hay diferentes grupos de investigación trabajando en esta línea pero, hoy por hoy, no se han conseguido todavía resultados determinantes”, subraya el ingeniero. La complejidad en este sentido se centra en el hecho de que cada exoesqueleto que se diseñe estará pensado para una persona concreta, con unas características y necesidades específicas, lo que conlleva que todos los parámetros se midan de forma personalizada.
Centro de referencia nacional
El profesor puntualiza que en una primera fase trabajará con personas sanas, a modo de prueba, y que una vez se haya recogido y analizado los primeros resultados, se trabajará con pacientes del Hospital Nacional de Toledo. Las primeras pruebas con pacientes se llevarán a cabo en mayo en colaboración con Ángel Gil, director de la Unidad Biomecánica de este centro único de referencia nacional en el tratamiento de la lesión medular espinal.
Las pruebas se van a realizar sobre dos tipos de afectados, según explica Gil, puesto que los exoesqueletos cumplen dos funciones: se pueden utilizar como elementos compensadores de la función de marcha para aquellas personas que han perdido la posibilidad de andar y no van a poder alcanzarla nunca, o como elementos rehabilitadores, para aquellos casos en los que se ha sufrido una lesión incompleta, en los que sí queda musculatura residual activa en los miembros inferiores. “Estos elementos robóticos también pueden favorecer la rehabilitación del paciente”, apunta Ángel Gil.
Además, Gil añade que los pacientes a los que se les plantea la posibilidad de colaborar en este tipo de pruebas se muestran muy participativos: “Son los primeros interesados en que la investigación llegue a buen puerto”. Y puntualiza que el propio proyecto y todo el proceso de experimentación son evaluados por un comité de ética, que incluye la información que se le facilita al paciente, además del debido consentimiento informado. “Los profesionales clínicos tenemos experiencia en la entrevista con el paciente y procuramos ser realistas, puesto que se trata de un proyecto que está empezando y cuyos resultados no son inminentes”, añade el investigador del Hospital de Toledo.
La tercera y la cuarta vía se centran en los mecanismos de atención cognitiva. Por ejemplo, el hecho de que durante la marcha se cruce un perro o aparezca un ciclista, es decir, en analizar la forma en la que influye el entorno. En este punto la UMH trabajará con el centro de investigación japonés Riken, centrado en el desarrollo de mecanismos de adaptación automática al entorno por parte del robot.
La investigación sobre robots con habilidades motoras y sensoriales bioinsiparadas, basadas en el funcionamiento natural del cuerpo humano, se encuentra en estos momentos dando sus primeros pasos en un viaje que implicará descifrar algunos de los secretos que esconde la naturaleza sobre el cerebro. Para Azorín: “El objetivo último, a lo que se aspira en un futuro, es a diseñar electrónica y robótica vestible”. Un reto en el que será esencial la existencia de una buena armonía entre mente y máquina.
Alicia de Lara