El robot capaz de suplir a los trabajadores en situaciones de riesgo
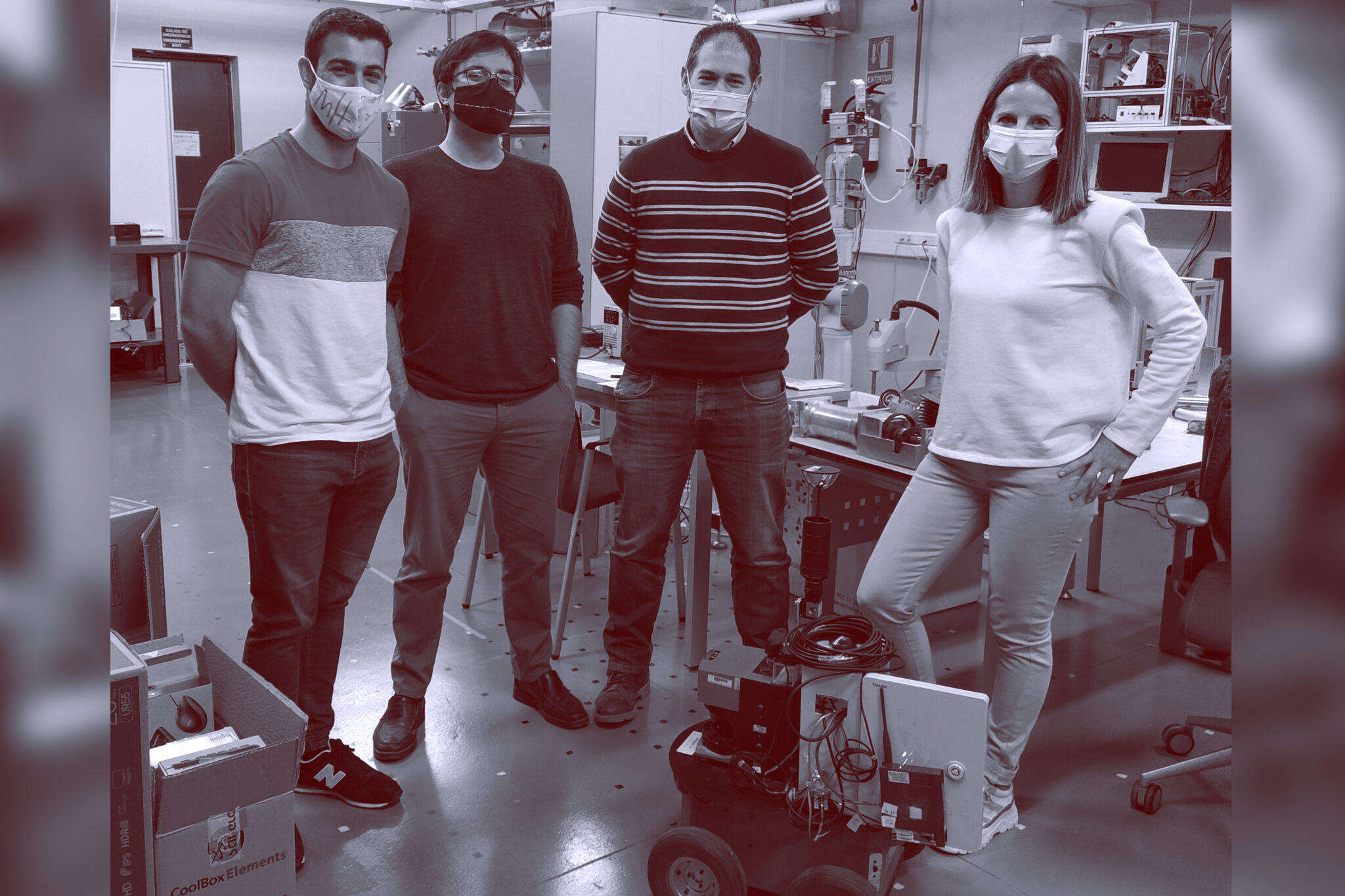
El grupo de investigación Automatización, Robótica y Visión por Computador (ARVC) de la UMH está trabajando en el diseño y desarrollo de un robot capaz de suplir a los trabajadores en las situaciones de riesgo.
Mónica Ballesta Galdeano, profesora titular del departamento de Ingeniería de Sistemas y Automática, forma parte de este proyecto junto a docentes e investigadores como Sergio Cebollada, Adrián Peidró y Arturo Gil. “Todos podemos imaginar trabajos que implican un riesgo importante para las personas, como los técnicos que tienen que subirse a torres de electricidad, hacer mantenimientos en fachadas de edificios o en cualquier otro punto de difícil acceso”, explica la profesora. Y añade: “para evitar estas situaciones, hemos trabajado en la fabricación de este robot de actuadores hidráulicos que puede actuar de forma eficiente en esos entornos, evitando situaciones peligrosas para el ser humano”.
El prototipo ha sido desarrollado para estructuras tridimensionales, como edificios, torres de telecomunicaciones o plantas industriales. Además, ha sido diseñado con un sistema de adhesión con imanes en las patas: “Podríamos generalizar ese sistema para que sea capaz de trabajar en otro tipo de superficies”, apunta Ballesta. Gracias a este elemento, el robot es capaz de interpretar lo que tiene alrededor.
Fuente: https://radio.umh.es/