Sabater Navarro: “Los robots son herramientas que mejoran la calidad de vida”
Darío Baño / F.N.Maillo
El ámbito científico que se ocupa de la robótica está sometido a cierta mitificación derivada principalmente de la ficción de películas como Terminator, según José María Sabater Navarro, subdirector del Grado en Ingeniería Electrónica y Automática Industrial de EPSE y miembro del Grupo de Investigación en Neurociencia Biomédica y Bioingeniería (NBIO), además de profesor en la UMH. Su ponencia, que interpreta la robótica como una realidad al servicio de las personas, ha inaugurado la IV edición de la Semana de la Ciencia, organizada por la Universidad Miguel Hernández y la asociación Ars Creatio en Torrevieja. A pesar de esa visión más cinéfila, apunta Sabater Navarro, esta tecnología de servicio permite considerar los robots como “herramientas que ayudan a las personas a mejorar su calidad de vida”.
Más allá su aplicación industrial, en la que la robótica se basa en la programación de procesos autónomos y repetitivos, Sabater ha destacado la importancia de esta innovación tecnológica al servicio de los humanos, cuyo objetivo primordial es facilitar diversas funciones vitales, sobre todo a enfermos o discapacitados. Por este motivo, señala el profesor, la seguridad de la persona cobra especial importancia en el diseño, la programación y la fabricación de robots de servicio, mientras que la aplicación industrial suele priorizar una precisión milimétrica, por ejemplo, en la fabricación de los robots que integran las cadenas de montaje de automóviles.
Entre los robots de servicios destacan los que se emplean con fines quirúrgicos. A diferencia del uso industrializado, la robótica quirúrgica compagina el trabajo de la tecnología con la labor del cirujano, como ocurre con el robot Da Vinci, pionero en este ámbito y uno de los avances más destacados en cirugía robótica mínimamente invasiva. En la actualidad, en torno a 21 servicios de cirugía de hospitales españoles (11 públicos y 10 privados) cuentan con este robot quirúrgico, a pesar de que, a día de hoy, existen importantes discrepancias en cuanto a su valor coste-eficacia. De acuerdo con varios informes, entre ellos uno del especialista Pier Cristoforo Giulianotti, de la Universidad de Illinois, el material que se utiliza en un quirófano asistido por esta tecnología (también conocido entre los profesionales como Dr. Da Vinci) es más costoso (cerca de dos millones de euros según la empresa Palex Medical, que lo comercializa en España). Sin embargo, apunta Giulianotti, al sumar los gastos adicionales a la patología, como reingresos posteriores o días de estancia hospitalaria, la técnica es coste-eficaz. De hecho, tras un año desde la adquisición del aparato, el Centro Integral Oncológico Clara Campal (CIOCC) concluyó que, en las más de 30 intervenciones en procesos oncológicos, habían ahorrado aproximadamente un 20% en estancias –con respecto a otras técnicas- y hasta un 25% en otros gastos de procesos, por lo que el procedimiento resultaba coste-eficaz.
Robótica más sencilla y humanizada
En la actualidad, el objetivo de los ingenieros, así como de la Sociedad Española de Cirugía Asistida por Ordenador (SECAO), con la que NBIO colabora activamente, es encontrar la fórmula que haga evolucionar un sistema tan aparatoso a otro más cómodo. En esto precisamente ha trabajado NBIO, con el desarrollo de Imhotep, un dispositivo robótico para su aplicación a cirugías laparoscópicas (examina el interior del abdomen), cuyo prototipo ha sido desarrollado en los laboratorios de la Universidad Miguel Hernández. Este tipo de cirugía mínima invasiva se caracteriza por la utilización de pequeñas incisiones (inferiores a 10 mm.) de modo que los instrumentos penetran en el cuerpo a través de esas zonas. Aunque este modelo aún dista del Da Vinci, permite realizar una teleoperación de una forma más cómoda. De hecho, su reducido tamaño, comparado con otros modelos conocidos, permite ubicar el dispositivo de forma ergonómica, liberando espacio de trabajo para el cirujano asistente. Es decir, se adapta sobre el paciente y se coloca encima del orificio de entrada, de modo que reduce el riesgo sobre el enfermo. Este dispositivo permite al cirujano un manejo sencillo del sistema a través de un simulador quirúrgico, esto es, la aplicación con la que dirigir el aparato principal; a éste se le adaptan otros robots “esclavos” reales, es decir, los “brazos” o extensiones que realizan el trabajo directo con el paciente.

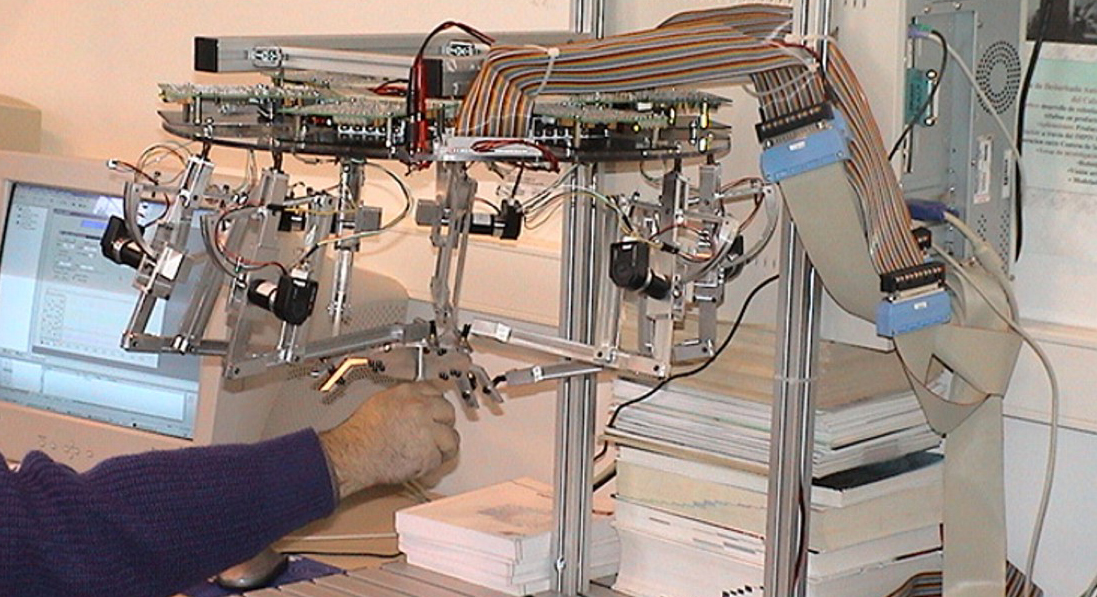
Otro de los proyectos desarrollados por NBIO se refiere al Magister-P, presentado por primera vez a finales de 2003 como interfaz háptica multidedo. Generalmente estos dispositivos se basan en estructuras tipo guantes o exoesqueletos que se colocan sobre la palma de la mano y suelen registrar las fuerzas que se alcanzan con cada dedo. El dispositivo háptico (extiende la sensación de contacto) diseñado por NBIO presenta seis grados de libertad y permite un funcionamiento como interfaz kinestésica (percibe la sensación de movimiento y la posición del cuerpo) en cualquier tipo de implementación, siendo capaz de reflejar fuerzas y/o posiciones. Así, mientras que el movimiento adelante-atrás se correspondería con un único grado de libertad, los 6 grados de libertad del Magister-P hacen referencia a los tres ejes de posición (X,Y,Z) y los tres de rotación, de modo que es posible el traslado (3 gdl) y la rotación (3gdl). De acuerdo con Sabater, la utilidad de esta interfaz es precisamente que imita el movimiento en un espacio real en el que existen 6 grados de libertad, es decir, es posible trasladarse pero también rotar permaneciendo en el mismo punto. Algo idéntico ocurre con un robot: “Con otros joysticks (de 3 gdl) tengo que decir si quiero trasladar o rotar, y con éste se puede decir al mismo tiempo la orden completa”, afirma Sabater.
Además, parte del trabajo de NBIO se ha dirigido hacia la innovación de los procesos para la rehabilitación robótica, liderada por los robots PUPArm (diseñado para la rehabilitación neuromuscular de miembros superiores) y AUPA (robot neumático). Según el Sabater Navarro, todavía no está comprobado que esta forma de rehabilitación asistida por robots obtiene un mejor rendimiento que la convencional, pero sí garantiza una mayor motivación por parte de la persona que la utiliza. De hecho, más allá del atractivo extra que suele suponer el uso del robot, dicha motivación se debe a que el sistema adapta el nivel de dificultad a la propia evolución del paciente, evitando así el sufrimiento y el estrés al enfermo, y reduciendo el riesgo de que éste abandone del proceso. Los resultados positivos de NBIO se suman así a la razón que justifica que, según la prestigiosa revista Scientific American, España ocupe el décimo puesto en el ranking de potencias mundiales en cuanto a innovación científica se refiere.




{kind=link}